Starframe devlog: Solving Constraints in Physics
Edit history
- 2025-11-26: Updated links from GitHub to Codeberg
The Starframe physics solver has gone through a few iterations recently as my understanding of the problem and knowledge of available methods have grown. In this post I attempt to explain what constraints are and detail a few game-engine-friendly ways of solving them. I'll try to make this understandable to someone with approximately the level of knowledge I had before starting this: decent linear algebra and calculus skills and a tiny bit of physics knowledge.
I'll start with the mathematical definition of constraints and then go over three solvers in the order I implemented them myself: a somewhat abstract matrix-based method I call Impulses with Projected Gauss-Seidel, a simpler variant of it called Sequential Impulses, and finally a more sophisticated and modern yet also simpler method called Extended Position-Based Dynamics.
There won't be enough information here to actually build a complete solver yourself; that level of detail is what papers are for (and I'll give links to all the ones I used). What I'm hoping to do is to give an accessible place to start, introduce some options to consider and how they're different, and to help understand why the math in the papers is the way it is.
What is a constraint?§
The essence of a physics engine (and the difficult part of building one) is not making things move — it's making things stop moving or change their trajectory in ways that make sense. Things interact with each other. A constraint, in a nutshell, is something that generates these interactions by stopping movement in unwanted directions.
Unfortunately, a nutshell alone isn't something you can feed into a computer, so I'll have to elaborate on this a bit. Let's look at a concrete example. The most important constraint in a rigid body engine is the contact constraint, which basically says "bodies aren't allowed to overlap". Let's say the collision detection system (that I won't cover in this post) notified us of a situation like this:
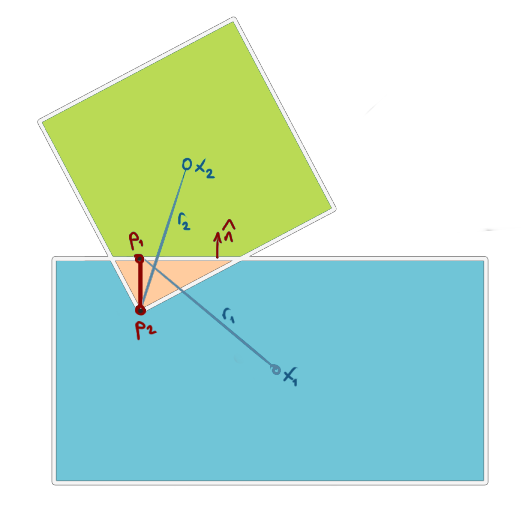
These bodies overlap, which is a violation of the contact constraint. So we know the system is in an illegal state, but that boolean information is not going to do us any favors in terms of finding a way out of this state. We need some more information, specifically how big the error is and how it changes when the bodies move. In the case of this contact, we can get these things by measuring the distance between points and along the surface normal :
This gives us the amount of error, but not quite how it changes when the bodies move. We get the final form of the constraint function by figuring out how the contact points depend on the body poses:
where and are the orientations of each body, and are the contact point in each body's local space, and multiplication between them denotes a rotation by the orientation. From here on I will use and to mean the worldspace offsets and respectively, as this is the notation used by most papers.
There are many ways to represent orientations. Most 3D engines use unit quaternions, the 2D equivalent of which is a unit complex number. In 2D, even just a single angle can be used. I use rotors from geometric algebra (see e.g. bivector.net for sources).
One question remains: what's an acceptable value for this function to return? Geometrically it measures the amount of overlap between the objects, so anything zero or less means there's no overlap at all. Thus, any state where
is legal. This is the whole constraint — a function from world state to a value and an acceptable range of values. That's what every kind of constraint boils down to. The constraint solver's job is to try to find a state where every constraint function returns an acceptable value.
Usually, the accepted range is either (called an equality constraint), or one of and (called inequality constraints). Allowing something other than zero on the right-hand side would unnecessarily complicate the solver, as constants like this can always be baked into the constraint function instead.
Another simple example of a constraint is a distance constraint, which attaches two objects such that the distance between selected points on them is always in some range.
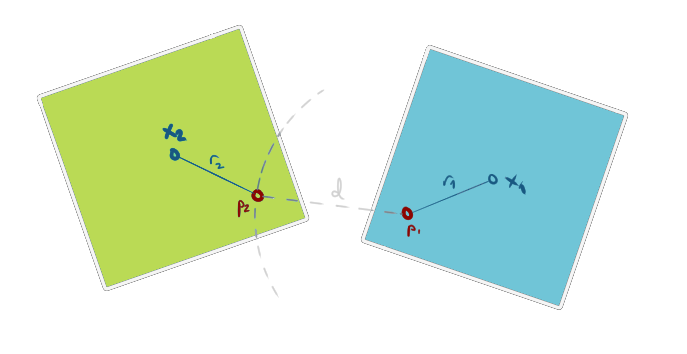
The curve illustrates the region in which is allowed to move if box 1 stays still.
To achieve this we can simply measure the difference between the actual distance and the desired one :
For the accepted range we have a choice: will only pull the bodies towards each other, will only push them apart, and will do both.
The idea of a constraint is very flexible. Putting the right math in can produce a variety of effects like friction, all sorts of joints, and with some additional trickery even things like motors and springs (we'll take a look at these things when discussing solvers). You can also remove one body from constraint function's parameters and attach bodies to places in the world instead. Technically more than two bodies could participate in a single constraint too, but this is a bit harder to implement efficiently and rarely useful. Quoting Erin Catto's (of Box2D fame) 2014 GDC presentation,
Constraints are an area of physics programming where we get to show our knowledge and creativity.
Check out e.g. the aforementioned presentation or this paper for some more examples of constraint functions.
Constraints aren't just a physics thing! For instance, they're also an important concept in optimization problems. The idea is the same there — a function that takes some variables and returns a scalar, plus an acceptable range for that scalar.
Solvers§
I've built three solvers so far: Impulses with Projected Gauss-Seidel, Sequential Impulses, and Extended Position-Based Dynamics. Let's take a look at the theory and source material of each.
Impulses with Projected Gauss-Seidel§
As a bit of motivation before I hit you with pages upon pages of text, here's what this solver's results look like in action.
Yes, I know there's a mouse cursor in that gif. No, I'm not going to do anything about it.
I based this solver almost entirely on this 2005 paper by Erin Catto, with some input from other content from the Box2D publications page and the book Game Physics by David Eberly. This was a long learning process that involved a ton of reading the same things over and over, and very little of the code I wrote for this is used anymore, but lots of invaluable understanding was gained.
This is probably the most difficult of these solvers from a math point of view, so it may be worth reading the rest of the post even if some of this stuff goes over your head.
Constraint formulation§
This method works on the velocity level, meaning that constraints take velocities as their parameters and are resolved with velocity adjustments. Earlier we defined constraints on positions instead, so we need to do a bit of work to make them compatible with this idea. Velocity is the first time derivative of position, so we can get to the velocity level by taking the time derivative of the position constraint function. Here's what this would look like for the contact constraint:
The dot on is a notation physicists use for the time derivative .
where is the linear velocity of body and is its angular velocity. The second term is likely to be negligibly small, so we drop it entirely, leaving
The cross products here only apply in 3D where angular velocity is represented as a 3D vector. In 2D is not a vector and the equivalent operation is where is the counterclockwise perpendicular (i.e. rotated 90 degrees counterclockwise, also known as the left normal) of .
Doing a similar differentiation on all of our position-level constraints (or defining constraints directly on the velocity level) gives us the building blocks of the problem. Now we can dive into the solver's job of making all these go on the right side of zero.
Beginning to arrange all the numbers in a way that this solver likes, we first factorize our velocity constraints into a product of two matrices, one containing the parameters of the constraint function (i.e. body velocities) and one containing their coefficients from our functions, like this: . Continuing with the contact constraint as our example,
Note that and contain vectors as a shorthand notation. The concrete matrices would be constructed by writing out the vectors elementwise, producing a total of 12 elements in 3D (3 per , 3 per ) and 6 in 2D (2 per , 1 per ).
here is called the Jacobian matrix of .
As far as I understand, calling this the Jacobian isn't entirely accurate, as the Jacobian is defined as the coefficients of spatial partial derivatives, whereas this one contains the coefficients of the time derivative. I don't know of a better word so I'll stick to the paper's nomenclature and call it the Jacobian nonetheless.
A geometric interpretation of is that must be orthogonal to to satisfy the constraint. In more intuitive terms, this means that must be aligned with the level curve/surface (because represents the steepest direction of change for and is thus orthogonal to its level curves).
What we need now is a vector to add to to accomplish this. There are an infinite number of such vectors, but not just any will do. Because a constraint's purpose is to prevent motion and not cause it, constraint forces should do no work. This is only true if the force is orthogonal to and thus collinear with . A force in any other direction would cause an acceleration in a direction allowed by the constraint, thereby doing work on the system.
This idea is hard to explain in rigorous terms and I may not have done it very well. I think it's very intuitive though — imagine a box sitting on a flat floor. Clearly, the supporting force keeping the box in place must be orthogonal to the floor; otherwise it would cause the box to start sliding in some direction.
Knowing this, we can express the force as , where is an unknown scalar that we can solve for.
here contains both the linear and angular components of the force, i.e. the force and the torque:
Constructing the problem§
We still need two more things to get to the problem we actually want to solve, which is how the system evolves over time. First, we need a set of equations called the equations of motion, which are exactly what they sound like — equations describing motion. These are given by the Newton-Euler equations. For a single body:
Here and are constraint forces and torques, and are external forces and torques (gravity, usually), is the mass of a body and its moment of inertia.
In 2D, moment of inertia is a simple scalar. In 3D, it's a 3x3 matrix.
Recalling that
and
we can refactor this into one matrix equation
where is a block-diagonal mass matrix that looks like this in 2D:
and like this in 3D:
To understand why the mass matrix is shaped like this, try computing the product and see how the result matches the two Newton-Euler equations above.
Add the constraint equation from earlier and we have all the necessary equations of motion. However, so far we've only been considering a single body. For the body , the equations of motion are thus
Fortunately, extending these to the whole system of bodies is fairly straightforward — we can simply stack the matrices from these equations on top of each other (give or take a couple of details). For a system of bodies:
One important detail is that the Jacobian rows won't line up correctly if they just have the four vector elements they had earlier in our two-body example. Here we need to treat them as if the constraint function took the entire system's velocity vector as its parameters, which means a lot of padding with zeroes.
This isn't super relevant to the actual solver because it doesn't really store the padding zeroes in memory at all, but I'm mentioning it because understanding the theoretical matrix dimensions was an important step in my own understanding of the math we're doing here.
Let's look at a concrete example. Say we have a system with three bodies. There are two contacts, C1 between bodies 1 and 2 and C2 between bodies 1 and 3. The velocity vector of this system looks like this:
Earlier we defined the contact constraint as
To replace the velocity vector here with the whole system's velocity vector which has 6 rows, we need to pad the contact jacobians so they have 6 columns. Here's the constraint vector for the whole system:
The subscripts are a bit of a mess with this many variables around, but hopefully you get the idea. Also, apologies to mobile users having to scroll this horizontally :P
Now that we have the matrices for the whole system, the equations of motion look exactly like the single-body versions from earlier but without the index subscripts:
Now we have our equations of motion. There's one more thing (besides which we want to solve for) that we don't have: the acceleration . We'll use a linear approximation: if we have a velocity , move forward in time by a step , and the velocity is now , then the acceleration during that time step is approximately
When we're at the beginning of the timestep, we don't know the value of — it's actually the thing we're trying to eventually calculate here! As you'll see in a second, this turns out to be less of a problem than it sounds like.
With this we finally have all the variables needed to actually solve for . The steps to get there are many and not entirely obvious, so I'll write them out:
We multiplied by in the last step because the constraint equation states that . We can now eliminate that term, flip the signs, and we're left with
We have the values for all the variables in this except , so we're ready to solve this!
This is just an equation with an equality symbol, which doesn't do anything to address inequality constraints. Those require some additional operations which we'll get to in a minute.
One more thing I do to simplify this further is to apply external forces before solving anything with
leaving just
The solver itself§
It's possible to solve this problem exactly with so-called global methods (which I don't know much about), but these methods are too expensive for real-time use. We need a faster approximate method. A class of numerical methods known as Gauss-Seidel has just what we need.
The basic Gauss-Seidel method for linear systems looks like this in (pseudo-)Rust:
The same algorithm is presented as regular pseudocode in the paper, so look there if you prefer that style.
/// approximately solve x in the linear system Ax = b
/// starting with an initial guess x0
fn gauss_seidel<const N: usize>(
a: [[f64; N]; N],
b: [f64; N],
lambda_0: [f64; N],
) -> [f64; N] {
let mut lambda = lambda_0;
for _iter in 0..MAX_ITERATIONS {
for i in 0..N {
let delta_lambda_i = (b[i] - dot(a[i], lambda)) / a[i][i];
lambda[i] += delta_lambda_i;
}
}
lambda
}
You might want to check e.g. how much the values of changed in an
iteration and exit early if they're all below some threshold, but it's probably
fine to just run MAX_ITERATIONS iterations every time.
However, we have inequality constraints which can't be expressed as a linear system of equations, so this isn't enough. Fortunately, we only need one new operation. The trick is that we can allow a range of values of by limiting the allowed range of . For instance, if we want , we can disallow negative values for .
Remember that represents an impulse that moves things in the gradient direction of , meaning that a positive would cause to increase and a negative would cause it to decrease. Thus, a negative would only appear when .
In general, we can clamp in a range . For example, the range for an inequality constraint would be . For an equality constraint we don't want any limits, so the range would be . This clamping operation is also called projection, hence the name Projected Gauss-Seidel algorithm, which looks something like this:
// changes from normal gauss-seidel denoted with // *
fn projected_gauss_seidel<const N: usize>(
a: [[f64; N]; N],
b: [f64; N],
bounds: [(f64, f64); N], // *
lambda_0: [f64; N],
) -> [f64; N] {
let mut lambda = lambda_0;
for _iter in 0..MAX_ITERATIONS {
for i in 0..N {
let delta_lambda_i = (b[i] - dot(a[i], x)) / a[i][i];
lambda[i] += delta_lambda_i;
lambda[i] = clamp(lambda[i], bounds[i].0, bounds[i].1); // *
}
}
lambda
}
The initial guess can be anything, but a vector of zeroes is a good choice if we have nothing better to go off. More on this later.
That's it! We can now take the matrix equation from earlier,
add appropriate bounds for inequality constraints, and feed it into this algoritm. In reality, there's also an indirection step to avoid storing lots of zeroes in and , but this is the gist of it. Refer to the paper for all the details.
By the way, this type of matrix problem involving inequalities is called a linear complementarity problem.
Finishing steps§
Now that we have , the hard part is done, but a few more things need to be done to put it in action. We need to apply the impulse to the system velocity and step forward in time.
Solving for from our earlier equations of motion gives
The best suited method for stepping forward in time with the information we have is the semi-implicit Euler method, which preserves energy well and doesn't require solving any further equations. The formula for it is simple: for each body with pre-timestep position and newly computed velocity we do
Now we run collision detection again to update , re-do all of this math, do that 60 times per second and we have a simulation! It's not the most accurate one out there, but it's quite fast and good enough for the vast majority of games.
Additional tricks§
There's a variety of little things we can plug on top of this method to improve its performance and model more kinds of things. Here's a brief overview of what I know of.
Resolving overlaps§
Because this method works on the velocity level, it prevents position-level errors from getting worse, but does nothing to resolve them. If two bodies overlap, solving the velocity-level contact constraint stops them from moving deeper into each other, but won't move them apart. In practice this causes stacks of objects to slowly sink into each other. A mechanism for resolving position errors is needed.
This solver addresses the problem using something called Baumgarte stabilisation. By modifying the constraint equation to include a bias: , constraints can be made to cause movement and not just stop it, doing work in the process. If we feed the position error into the bias term, the velocity constraint will push bodies towards a permissible configuration:
where is a tuning coefficient that controls how fast errors are resolved.
With this modification, the equation for becomes
A problem with this is that constraints with nonzero bias do work, thereby adding energy to the system. If is too high, objects can jitter and bounce when they collide, but if it's very low, overlaps will take a long time to resolve.
In his later work (e.g. [this presentation][cat14]), Catto speaks about using pseudo velocities for corrections instead. These are velocities that are immediately discarded and don't affect future states, removing the problem of generating energy.
Another option is projection, which simply moves objects apart directly on the position level. This doesn't create energy, but tends to cause stacked objects to jitter due to the projection away from one object moving them into overlap with another one.
Whatever method you choose, leaving a bit of slop can make a big difference. This means scaling position errors down slightly before solving them, so that they're never quite resolved completely. This guarantees that resting contacts get a collision every frame, eliminating jitter caused by overcorrections pushing objects all the way apart.
Other uses for bias§
Bias can be a useful tool even if you do something else to correct errors. For example, elastic collisions (i.e. bouncy things) can be modeled by setting the bias to , where is called the coefficient of restitution.
I haven't actually implemented this, but I'm pretty sure that's the formula.
Also, various kinds of motors can be created by varying a constraint over time and using bias-based position correction (as described above) to power it.
Friction§
Friction is a bit of a weird phenomenon to represent as a constraint, for a few reasons. For one, it only exists at the velocity level. Also, it doesn't always completely stop movement; in most cases it merely slows things down. How much it slows things down depends on many factors.
Friction slows down movement in the tangent direction of every contact. A neat thing about this is that we can reuse the constraint equation from the contact, just replacing with its tangent.
In 3D, the tangent is a plane. The paper uses two separate constraints with two linearly independent tangent vectors to achieve friction in the whole tangent plane. This is results in something called a pyramid-shaped friction cone. It's not perfectly accurate, but as usual, game physics is all about being fast and plausible.
We can simulate a bounded friction force by limiting the minimum and maximum values of for the friction constraint. The paper uses a simplified model with a single coefficient of friction and no regard to other forces in the system with
where is the coefficient of friction between the colliding bodies' materials, is a fraction of the bodies' masses depending on the number of contact points between them, and is the acceleration of gravity.
In my solver, I went for a slightly more sophisticated model based on Coulomb's friction model, which states that the friction force is bounded by the supporting force:
where is the impulse caused by the contact constraint related to this friction constraint. This requires a bit more code for finding but is more realistic, especially in stacks of bodies where the ones at the bottom correctly experience more friction than the ones at the top.
In reality, there's also a difference between static and dynamic friction, i.e. friction that prevents motion from starting and friction that slows down nonzero motion. I didn't care enough to implement this.
Also in reality, all pairs of two materials have their own coefficients of restitution and friction. This level of granularity isn't really necessary in games, so we usually store these coefficients with individual materials and form the pairwise coefficients with an average, min, or max.
Impulse caching§
Sometimes the PGS algorithm is slow to converge on the correct solution. These cases can be made less common with better initial guesses, and physics has a nice property called temporal coherence that can help us here. This means that things tend not to change much from one timestep to the next. By caching the result of one timestep and using it as the next step's initial guess , convergence becomes faster whenever the state of the system doesn't change drastically between timesteps. This is called warm starting the algorithm.
This can have a side effect of causing bounces when large forces suddenly disappear, as you start with a large and fail to converge on the small correct solution. It may be helpful to tune it e.g. by multiplying with some constant between 0 and 1, .
I'm not an expert on when or why convergence is slow, but one such situation is when bodies with wildly different masses interact. You can help convergence simply by designing systems where big mass discrepancies don't exist.
This introduces a tricky little problem: contacts are regenerated by collision detection every timestep. We need a way to match new contacts with previous ones to figure out which element of belongs to them. The paper introduces a couple of options for solving this: contact point positions or incident edge labels. Contact point positions change, so they need a tolerance region where two points are considered the same. This is tricky because it's hard to know how much the contact points can move between timesteps. Labeling incident edges means assigning numbers to the edges on each body's collider that make up the contact point. I used a method similar to this, but my implementation had some problems so probably don't copy it :)
Islands and sleeping§
This is an optimization method the paper doesn't cover and I haven't implemented (yet) either, but it's something worth knowing. By building a graph with bodies as nodes and constraints as edges, we can identify sets of bodies that directly or indirectly affect each other, often called islands.
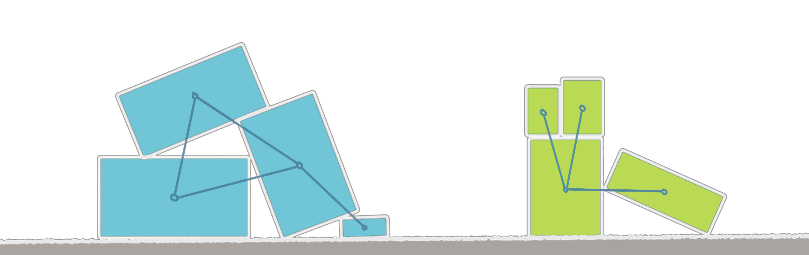
The graph of bodies (illustrated with circles) and constraints (lines) has no connection between the green and blue sets of blocks.
Having identified these islands, we can send them all to different threads to solve with PGS (which itself can't be parallelized) simultaneously or, more importantly, islands where nothing is happening can be set to sleep. This means that they're skipped entirely by the solver until their topology changes, that is, a new constraint appears (a collision happens) or something disappears. You can imagine how much time this would save in a large game level where things only actually happen near the player.
Code§
For those who like to read code, here's a link to my PGS solver's source code, and here's the timestep function that builds all the matrices.
Sequential impulses§
Finally, I've run out of things to ramble about and it's time to move to a different method. We're not going very far though — this one still works on the velocity level with mostly the same constraint formulations, is still largely based on Erin Catto's work, and even the code for it is mostly the same as before. The method is called Sequential Impulses, and it does what it sounds like it does.
The idea of this solver is that instead of building this big matrix problem that PGS wants, we compute individually for every constraint (using the exact same equations from earlier) and immediately apply it to body velocities. Repeat this however many times you can afford to and you have an approximate global solution.
If you (figuratively) squint your eyes a little, this looks almost exactly like PGS, which solves each row of the matrix individually. The benefit is the removal of the matrix abstraction, which makes the method easier to understand and somewhat more flexible — it's easy to change the formula for on a per-object basis if you need to.
So why did I make this change? I was trying to implement soft constraints, which are a way to express physically accurate springs as constraints. This changes the formula for in a way that isn't entirely obvious in how it fits into the matrix of PGS, so I found it easier to switch methods.
Soft constraints§
The difference between hard and soft constraints is that soft constraints resolve over multiple timesteps and not immediately. This is achieved by augmenting the constraint equation from
to
Here is a position correction coefficient similar to Baumgarte stabilisation earlier, responsible for steering the constraint towards , and , called compliance, feeds back into the equation, allowing a constraint violation proportional to currently applied force. This is hard to understand intuitively and I don't really know how to explain it any better, but take a look at the slides linked earlier to see how they relate to spring-damper systems and harmonic oscillators.
The reason why I found this hard to integrate into PGS is that it changes the way is treated. Instead of just computing a , applying and then discarding it, we need to hold on to it because it's on both sides of the equation now. This ends up looking like this:
All the tricks like warm starting and Baumgarte stabilisation discussed at the end of the last chapter still apply here, but warm starting in particular requires some care as it doesn't play as well with soft constraints.
The code for this one is a bit messy because it heavily reuses PGS code, and I don't think I used harmonic oscillator parameters correctly, but for the sake of completeness, here's a link to this solver incarnation's source code.
Extended Position-Based Dynamics§
While I was working on Sequential Impulses, I suddenly remembered this Two Minute Papers video about an impressive-looking recent method called Extended Position-Based Dynamics (abbreviated XPBD). I was unhappy about how messy my code was getting and thought it was a perfect time to check out the source paper. Surprisingly, I was able to understand more or less all of it and decided to redo my entire solver once again.
As the name implies, XPBD is an extension of the Position-Based Dynamics (PBD) method to handle rigid bodies. PBD, then, is a method of particle simulation based on Verlet integration where constraints are solved on the position level and velocities aren't touched at all. Velocity is then approximated from position changes. In pseudo-Rust,
fn pbd_timestep(dt: f64) {
for p in particles {
p.old_position = p.position;
p.velocity += (ext_force / p.mass) * dt;
p.position += p.velocity * dt;
}
solve_position_constraints();
for p in particles {
p.velocity = (p.position - p.old_position) / dt;
}
}
Velocity is still used to move particles at the beginning of the timestep. The point is that it's never manipulated directly.
Why is this good? Many position constraints are nonlinear. For instance, the distance constraint wants particles to move in a circle around each other, which clearly isn't a linear shape. If we take the time derivative to solve this type of constraints on the velocity level, we create a linear problem, which can be easier to solve but comes with inaccuracy. Here's an illustration similar to one you can find in the XPBD paper:
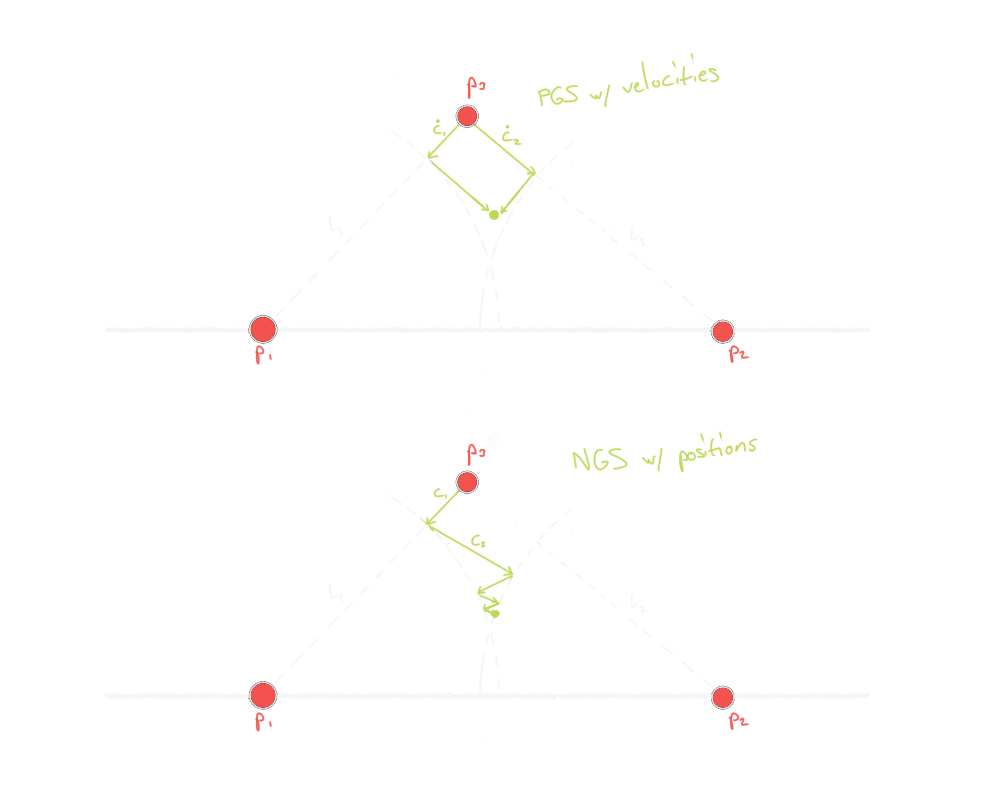
Here and are fixed positions that the particle is attached to with distance constraints and . The first image shows how a velocity-level solve can only operate in the initial direction of the distance constraints, and as a result can never find the position satisfying both constraints. The second image shows how a position-level solve can change the correction direction, enabling it to converge on the correct solution.
This type of iterative solution methods where the direction can change are called nonlinear Gauss-Seidel methods.
Because PBD is good at nonlinear problems, it's popular in simulating deformable bodies such as cloth built out of distance-constrained particles. An advantage of XPBD compared to velocity-based methods is that connecting such simulations with rigid bodies becomes very simple.
Adding rigid bodies§
The trouble with rigid bodies compared to particles is that in addition to position, they also have an orientation. Regular PBD only deals in positions. This is where the X in XPBD comes to the rescue, adding correction operations that handle orientations.
For a general position constraint (where denotes a pose with a position and orientation ), starting from Newton's second law like we did with the PGS solver, adding compliance (familiar from soft constraints) and solving for a position correction gives
The derivation for this can be found in the original XPBD paper. This paper uses some advanced language and ideas I don't understand well enough to explain, so I won't go over the whole thing here.
where is compliance. The only difference from the velocity-level soft constraints from earlier is using the gradient in place of and dividing compliance by timestep one more time to get physically correct units at the position level (plus a different symbol for compliance).
In terms of physical properties, compliance is the inverse of stiffness. Hard constraints like contacts have a compliance of zero, corresponding to infinite stiffness.
Having solved for we apply it to poses (positions and orientations) with
You could also use this to resolve overlaps with the projection method in velocity-based solvers! (although simpler, less physically accurate ways are also available.)
Note the similarity to the velocity-level formula from earlier,
For inequality constraints, we can use the familiar trick of clamping before applying it.
The paper also gives specific formulas for contact-style offset-direction constraints and angle-only constraints, but these are just special cases of the general formula I just presented. Check them out if this feels too abstract.
Velocity§
The whole point of PBD is to not actually touch velocity, however, this comes with some problems. First, when things collide and get projected apart, the approximate velocity now depends on how far apart the bodies were at the start of the timestep and has no physical relevance. Also, there's no way to make things bounce off each other. Secondly, dynamic friction is a fundamentally velocity-level phenomenon that simply cannot be simulated with position-level constraints. To address these cases, XPBD adds a velocity adjustment step that replaces the approximate velocity with a realistic one.
For each contact, we need the relative velocity between the contact points on each body. This is computed from the body velocities , angular velocities and body-space contact points with
in 3D, or
in 2D.
I'm using bolded symbols for vectors here to clarify which variables are vectors and which are scalars.
We split this into normal and tangent velocities (for bounces and friction, respectively) with respect to the contact normal with
What we want is for the normal velocity to be zero (in the case of an inelastic collision) or reflected away (in the case of an elastic collision) and the tangent velocity to be reduced by some amount (as friction always acts to slow things down). Let's calculate how the velocity needs to change to accomplish these things.
To achieve an inelastic collision, we can simply add to the velocity. For elasticity, we also need the normal velocity at the start of the timestep so we can reflect it. The formula ends up being
where is the coefficient of restitution between the two bodies and the function avoids "inward" bounces in the case where the reflected velocity doesn't point away from the contact surface.
For friction, we use the familiar Coulomb model. In the tanget direction , we apply a correction
where is the dynamic friction coefficient for the pair of materials, is the normal force applied during position correction , and the operation ensures the correction doesn't overshoot past the point where .
One more velocity correction is used for damping of various constraints, which simulates sources of drag such as air resistance. The formula is simple,
This can be handy when used together with compliance, creating springs that slow down over time instead of oscillating forever.
To apply the velocity update, we take the sum of all of the above and turn it into an impulse
where is a generalized inverse mass or effective inverse mass equivalent to from earlier. Its formula here is
in 3D or
in 2D. Here is the normalized direction of the velocity update .
Check Appendix A of the paper for the derivation.
With the velocity step done, we get realistic collisions and friction on par with velocity-based methods.
There's also static friction, which I didn't do in earlier solvers, but it's actually quite easy in this framework — because static friction keeps objects in place, it can be implemented as an attachment constraint on the position level! In the position solve phase, we test if a correction bringing the contact points together in the tangent direction would be less than , where is the static friction coefficient and is the correction in the normal direction. If so, we apply the correction, if not, do nothing and let dynamic friction do its thing in the velocity step instead.
Details, pros, and cons§
The way the earlier solvers did their time-stepping was to step forward once per animation frame and spend time iterating the constraint solve algorithm to convergence. As it turns out, at least with XPBD, it's actually optimal (in terms of numerical error) to do it the other way around: spend time simulating multiple timesteps per animation frame, but only ever do one iteration of the constraint solve. Doing this results in significantly improved energy conservation and stiffness, as this comparison shows:
Above is the PGS solver from earlier, and below is the new XPBD solver:
Pay particular attention to the chains — there's less random jitter (unfortunately this is at a scale the gif doesn't show very well), but at the same time they're moving in a much more fast and lively way with smooth high-frequency oscillations. This is the effect of XPBD's higher accuracy and conservation of energy.
This comes with a couple of tradeoffs. One is that collision detection needs to be run again every substep, which costs computation time. It helps to have a broad-phase algorithm that you can run once at the start of a frame and only re-run narrow-phase queries on pairs it returned. The paper uses an AABB tree.
Collision detection is a likely subject of a future blog post (that hopefully won't be as long as this one). In the meantime, I recommend Metanet Software's tutorials for more information in an easily digestible form.
The other tradeoff from splitting the timestep is that very short timesteps can create numbers so small that 64-bit floating point numbers are required to do the computations with enough accuracy. This isn't a problem on a CPU, but I believe it can be a performance hit if you're implementing this on a GPU.
That isn't the only difficulty with a GPU implementation, as none of these Gauss-Seidel type algorithms can be run in parallel. Jacobi methods are a parallel alternative, but I don't really know how they work.
Solving constraints at the position level makes some problems that are nontrivial in impulse-based solvers extremely easy. First of all, there's obviously no need for a separate process like Baumgarte stabilisation for resolving overlaps because this method is the projection method. Similarly, joint limits (think stops on a hinge or rail) are just projected away, where impulse-based methods end up doing things like predictive joints.
Another case that becomes simplified is the attachment constraint, which is just a distance constraint of zero. You could imagine it as a nail. It seems simple (can't you just make a distance constraint of zero?), but it's deceptively complicated because a distance constraint's gradient is zero when distance is zero. Because of this, an impulse-based solver can't decide a direction to move things in and ends up needing multiple constraints (one for each coordinate axis, actually) to solve robustly. The nonlinear position-based solver, on the other hand, can do this with just a distance constraint.
One more advantage of XPBD is that it isn't helped by warm starting, which sidesteps the entire problem of caching contact points. Overall, this solver is a major step down in complexity. I'm really pleased with my implementation and excited to start building things with it!
Code§
This is the method I'm still using today (unless I changed again and forgot to update this post), so the source code can be found in the latest revision of Starframe. The solver resides in physics.rs. At the time of writing it's still somewhat of a work in progress, but contacts, friction, and distance constraints are already there.
Final words§
Phew! Writing this post was quite a ride, and I'm sure it was a heck of a heavy read as well. My own understanding of the topic grew immensely over the course of writing, and I hope I was able to communicate a bit of it to someone else too.
To quickly recap the content, we went over the mathematical idea of a constraint, two impulse-based methods for solving them — Projected Gauss-Seidel and Sequential Impulses — and the new hotness called Extended Position-Based Dynamics. All of them derive from Newton's second law, with different constraint formulations and time-stepping methods. XPBD comes with some elegant solutions to problems impulse-based methods struggle with, but all of these are totally viable methods for game purposes.
If you have any questions, compliments, complaints or corrections, feel free to ping me on the Rust-gamedev Discord server (I'm @Molentum there) or on Mastodon (link at the top of this page).